3D-printing with Co-Bots
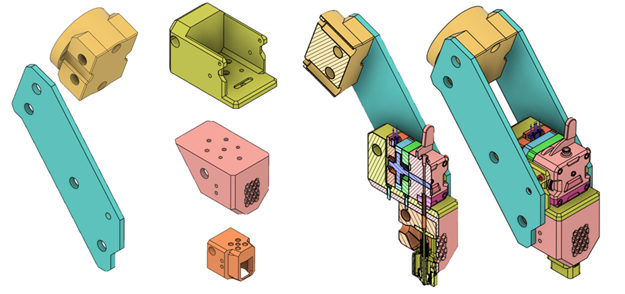
During our integrated project at the Robotlab we built CoboPrint v2: a complete 3D-printing cell around the ABB GoFa cobot. As a multidisciplinary team of mechanical and electrical engineering students we designed the modular end-effector, curated the off-the-shelf components, and engineered the electronics, control logic, and safety layers so the cobot can operate safely alongside students.
With Grasshopper we created parametric workflows that generate non-planar, multi-axis toolpaths, inserted flow-rate control into the RAPID programs, and simulated TCP behaviour before the cobot executed each print. A Raspberry Pi running Klipper drives the extruder in real time, giving us precise material deposition during classroom demos and open days.
The result is a reliable demonstrator capable of printing complex geometries and ready for education and outreach. Future iterations will focus on improved cooling and quicker material changes, but the current system already shows how collaborative robots and advanced toolpathing combine into a powerful, safe 3D-printing platform for the Robotlab community.
Download Document
Download the Document for the full resolution